Politechnika Świętokrzyska
Al. Tysiąclecia Państwa Polskiego 7
25-314 Kielce
tel.: 041 34 24 101, 34 24 319
fax: 041 34 42 307
e-mail: laboratoria@tu.kielce.pl
www.tu.kielce.pl
Uniwersytet Jana Kochanowskiego
ul. Żeromskiego 5
25-369 Kielce
tel.: 041 349 72 06, 349 73 35
fax: 041 349 73 35
e-mail: laboratoria@ujk.kielce.pl
www.ujk.kielce.pl


Laboratorium Mechatroniki, Automatyki i Robotyki
Pracownia Mechatroniki
Zakres badań:
Działalność naukowo-badawcza Pracowni Mechatroniki skupia się w czterech obszarach:
- Napędy i sterowania hydrauliczne i pneumatyczne.
- Systemy płynowe w automatyzacji i robotyzacji produkcji.
- Mechatronika – hydrotronika, pneumatronika, robotronika.
- Biomechatronika, bionika, bioroboty, biochwytaki.
W Pracowni Mechatroniki prowadzone są prace badawcze
w zakresie modelowania dynamiki, symulacji cyfrowej, badania, analizy
dynamicznej, syntezy dynamicznej i sterowania układów hydraulicznych i
pneumatycznych stosowanych w urządzeniach automatyki, manipulatorach i
robotach, mikrosystemach (mikrohydraulika i mikropneumatyka) oraz inżynierii
medycznej. W badaniach wykorzystuje się nowoczesną bazę laboratoryjną z
mikroprocesorowymi układami sterowania, elektronicznymi układami pomiarowymi,
nowoczesnymi metodami badawczymi oparte na symulacji cyfrowej i sztucznej
inteligencji (logice rozmytej i sztucznych sieciach neuronowych).
Na rys. 1 przedstawiono schemat stanowiska eksperymentalnego do badania dokładności pozycjonowania serwonapędów elektrohydraulicznych przy zastosowaniu regulatora adptacyjnego zbudowane w opaciu o prezentowany na rys. 12 serwonapęd natomiast na rys. 2 jego widok ogólny. Istotą
przedstawionego układu regulacji jest cyfrowa identyfikacja modelu serwonapędu
elektrohydraulicznego. Przeprowadzono identyfikację obiektu
laboratoryjnego w czasie rzeczywistym potrzebną do stałej aktualizacji nastaw
regulatora adaptacyjnego PID napędu elektrohydraulicznego w trakcie jego pracy.
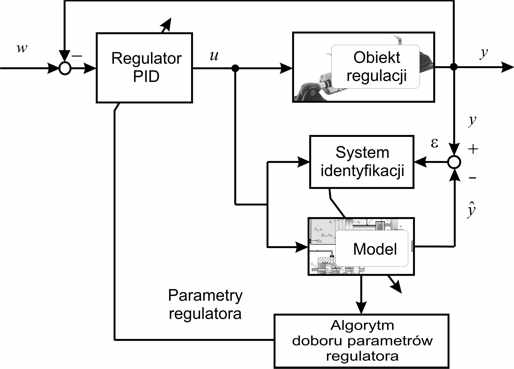
 Istotnym zagadnieniem dotyczącym doboru parametrów regulatora adaptacyjnego jest prawidłowa
identyfikacja modelu obiektu sterowania. Zarówno dobór parametrów modelu jak i
parametrów regulatora odbywa się w czasie rzeczywistym (on-line). Poprawna identyfikacja parametrów modelu decyduje o jakości
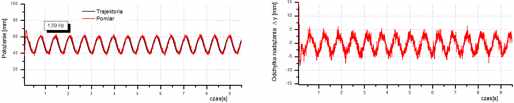
regulacji serwonapędu elektrohydraulicznego. Ważne w przeprowadzonych badaniach eksperymentalnych jest również właściwy
dobór narzędzia weryfikacji dopasowania modelu do
zamierzonej odpowiedzi obiektu. Na rys. 2 i rys. 3 przedstawiono wyniki badań eksperymentalnych dla trajektorii sinusoidalnych.
Istotnym zagadnieniem dotyczącym doboru parametrów regulatora adaptacyjnego jest prawidłowa
identyfikacja modelu obiektu sterowania. Zarówno dobór parametrów modelu jak i
parametrów regulatora odbywa się w czasie rzeczywistym (on-line). Poprawna identyfikacja parametrów modelu decyduje o jakości
regulacji serwonapędu elektrohydraulicznego. Ważne w przeprowadzonych badaniach eksperymentalnych jest również właściwy
dobór narzędzia weryfikacji dopasowania modelu do
zamierzonej odpowiedzi obiektu. Na rys. 2 i rys. 3 przedstawiono wyniki badań eksperymentalnych dla trajektorii sinusoidalnych.
English version:
Scope of research: The principal research activities fall into four categories: Fluid Power Technology (hydraulic and pneumatic drives and controls), Fluid Power Systems in Automated Production (fluid systems for automated and robotized production processes), Mechatronics (hydrotronics, pneumatronics, robotronics), and Biomechatronics (bionics, biorobots, biogrippers). Other research themes include dynamics modelling, digital simulations, dynamic analysis, dynamic synthesis, control of hydraulic and pneumatic systems for automated production, manipulators, robots, micro-hydraulic and micro-pneumatic systems, and biomedical engineering systems. Recent research projects have been conducted using modern equipment (microprocessor control systems and electronic measurement systems) and modern methods (digital simulation and artificial intelligence, e.g. fuzzy logic and artificial neural networks).
Powrót »
