Politechnika Świętokrzyska
Al. Tysiąclecia Państwa Polskiego 7
25-314 Kielce
tel.: 041 34 24 101, 34 24 319
fax: 041 34 42 307
e-mail: laboratoria@tu.kielce.pl
www.tu.kielce.pl
Uniwersytet Jana Kochanowskiego
ul. Żeromskiego 5
25-369 Kielce
tel.: 041 349 72 06, 349 73 35
fax: 041 349 73 35
e-mail: laboratoria@ujk.kielce.pl
www.ujk.kielce.pl


Laboratorium Innowacyjnych Technik Komputerowych
Pracownia Multikomputerowa Robotów Mobilnych
Pioneer 3 DX
Robot mobilny o budowie modularnej:- udźwig powyżej 20 kg,
- 8 czujników ultradźwiękowych z przodu robota,
- 8 czujników ultradźwiękowych z tyłu robota,
- możliwość ręcznego sterowania za pomocą joysticka,
- możliwość wymiany akumulatorów podczas pracy (ang. hot swap),
- oprogramowanie dla robota bazujące na systemie Linux i obejmujące programy narzędziowe oraz biblioteki podprogramów do tworzenia własnych programów,
- komputer pokładowy: płyta główna w formacie EBX, architektura zgodna z x86, moduł Wifi w standardzie 802.11,
- monochromatyczny system wizyjny stereo,
- dalmierz laserowy typu SICK LMS200,
- żyroskopowy system korekcji położenia,
- chwytak z dwoma stopniami swobody,
- tylny zderzak z mechanicznym czujnikiem wykrywania kolizji - 5 czujników nacisku.
Pioneer 3 AT
Robot mobilny o budowie modularnej:- do zastosowań wewnątrz pomieszczeń i w otwartym terenie,
- wyposażony w cztery koła, pozwalające na poruszanie się robota w lekkim terenie (ubita ziemia, chodnik, trawa),
- 8 czujników ultradźwiękowych z przodu robota,
- 8 czujników ultradźwiękowych z tyłu robota,
- możliwość ręcznego sterowania za pomocą joysticka,
- możliwość wymiany akumulatorów podczas pracy (ang. hot swap),
- oprogramowanie dla robota bazujące na systemie Linux i obejmujące programy narzędziowe oraz biblioteki podprogramów do tworzenia własnych programów,
- komputer pokładowy: płyta główna w formacie EBX, architektura zgodna z x86, moduł Wifi w standardzie 802.11,
- monochromatyczny system wizyjny stereo,
- żyroskopowy system korekcji położenia,
- chwytak z dwoma stopniami swobody,
- 12-kanałowy odbiornik sygnału GPS, pozwalający uzyskać dokładność pozycji około 1m w otwartym terenie.
Komputer przenośny typu notebook (2 sztuki):
- ekran LCD o przekątnej 14,4 cala.- procesor 4-rdzeniowy,
- pamięć RAM o pojemności 4GB,
- dysk twardy o pojemności co najmniej 320GB,
- napęd optyczny: DVD+/-RW DL,
- normatywny czas pracy na zasilaniu akumulatorowym: co najmniej 5 godzin,
- interfejsy bezprzewodowe: WiFi IEEE 802.11a/b/g/n, Bluetooth,
- 4 złącza USB.
Klaster serwerów x86-64:
- dwie szafy RACK 80x100cm,- sieć Infiniband QDR 40Gbit oraz Ethernet 1Gbit,
- zasilanie z redundancją i podtrzymaniem przez zasilacz UPS o mocy 24kW,
- zarządzanie z pomocą konsoli KVM,
- serwer NAS o pojemności 16TB złożony z 20 dysków połączonych w macierz typu RAID 60,
- 16 serwerów typu BLADE o architekturze x86-64, każdy wyposażony w 4 procesory 8-rdzeniowe, 1GB pamięci RAM na każdy rdzeń procesora, dysk twardy 150GB na każdy moduł.
English description:
Pioneer 3 DX
Modular mobile robot (mobot):- load capacity over 20 kg,
- 8 front sonar rangefinders,
- 8 back sonar rangefinders,
- possibility to drive the mobot manualy via joystick,
- hot-swap replaceable batteries,
- Linux-based software tools and development libraries,
- onboard computer: EBX format mainboard, x86 architecture, 802.11 standard Wifi module,
- monochrome stereovision system,
- SICK LMS200 laser rangefinder,
- gyroscopic correction system,
- gripper with 2 degrees of freedom,
- rear bumper with mechanical collision detection - 5 sensors.
Pioneer 3 AT
Modular mobile robot (mobot):- for indoor and outdoor purposes,
- 4 wheels allowing the mobot to move in a light terrain (hard ground, pavement, grass),
- 8 front sonar rangefinders,
- 8 back sonar rangefinders,
- possibility to drive the mobot manualy via joystick,
- hot-swap replaceable batteries,
- Linux-based software tools and development libraries,
- onboard computer: EBX format mainboard, x86 architecture, 802.11 standard Wifi module,
- monochrome stereovision system,
- gyroscopic correction system,
- gripper with 2 degrees of freedom,
- 12-channel GPS receiver, around 1m accuracy in an open terrain.
Notebook portable computer (2 pieces):
- 14,4 inch LCD screen.- 4-core CPU,
- 4GB of RAM memory,
- harddrive with at least 320GB capacity,
- DVD+/-RW DL optical drive,
- normative time on battery: at least 5 hours,
- wireless interfaces: WiFi IEEE 802.11a/b/g/n, Bluetooth,
- 4x USB connectors.
Cluster of x86-64 servers:
- two 80x100cm RACK housings,- Infiniband QDR 40Gbit and Ethernet 1Gbit network,
- redundant power with 24kW UPS power supply,
- KVM management console,
- NAS server with 16TB of capacity, consisting of 20 disks connected in a RAID 60 array,
- 16 BLADE x86-64 servers, 4 processors with 8-cores each, 1GB of RAM memory for each core, 150GB harddisk for each module.


Klaster serwerów typu BLADE o architekturze x86 (widok z przodu i z tyłu)
The cluster of BLADE x86 servers (view from front and back)

Robot mobilny Pioneer-3 DX - platforma bazowa
The Pioneer-3 DX mobile robot - base platform

Robot mobilny Pioneer-3 AT - platforma bazowa
The Pioneer-3 AT mobile robot - base platform
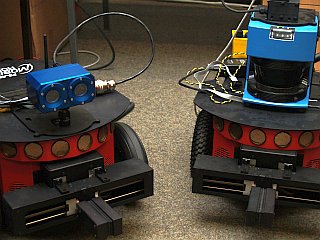
Pioneer-3 AT (z lewej) i Pioneer-3 DX (z prawej) z zamontowanym wyposażeniem
Pioneer-3 AT (left) and Pioneer-3 DX (right) with equipment
Robot mobilny Pioneer-3 DX - platforma bazowa
The Pioneer-3 DX mobile robot - base platform
Robot mobilny Pioneer-3 AT - platforma bazowa
The Pioneer-3 AT mobile robot - base platform
Pioneer-3 AT (z lewej) i Pioneer-3 DX (z prawej) z zamontowanym wyposażeniem
Pioneer-3 AT (left) and Pioneer-3 DX (right) with equipment
Powrót »
